






पाँच-अक्ष ठाडो मेसिनिङ केन्द्र CV श्रृंखला











सुविधाहरू
मेसिन परिचय
पाँच-अक्ष ठाडो मेसिनिङ सेन्टर CV श्रृंखलामा उच्च कठोरता, उच्च परिशुद्धता र उच्च दक्षता मेसिनिङको विशेषताहरू छन्। स्तम्भले ठूलो स्प्यानको साथ हेरिंगबोन डिजाइन अपनाउँछ, जसले स्तम्भको झुकाउने र टर्सनल बल बढाउन सक्छ; वर्कबेन्चले उचित स्लाइडर स्प्यान अपनाउँछ र सतह निभाइन्छ, ताकि वर्कबेन्चमा बल एकसमान छ र कठोरता सुधारिएको छ; ओछ्यानले ट्रापेजोइडल क्रस-सेक्शन अपनाउँछ, गुरुत्वाकर्षणको केन्द्रले टोर्सनल बल सुधार गर्दछ; सम्पूर्ण मेसिनले उत्कृष्ट समग्र स्थिरता प्रदान गर्न प्रत्येक कम्पोनेन्ट डिजाइन गर्न परिमित तत्व विश्लेषण प्रयोग गर्दछ।
सबैभन्दा छिटो तीन-अक्ष द्रुत विस्थापन 48M/मिनेटमा पुग्न सक्छ, TT उपकरण परिवर्तन समय मात्र 2.5S हो, उपकरण पत्रिका पूर्ण रूपमा 24t को लागि लोड गरिएको छ। यो जटिल आकारहरू र जटिल गुफाहरू र सतहहरू भएका विभिन्न 2D र 3D अवतल-उत्तल मोडेलहरूको लागि उपयुक्त छ। यो मिलिङ, ड्रिलिंग, विस्तार, बोरिङ, ट्यापिङ र अन्य प्रशोधन प्रक्रियाहरूको लागि पनि उपयुक्त छ बहु-विविध प्रशोधन र उत्पादनको साना र मध्यम आकारका ब्याचहरूका लागि अधिक उपयुक्त छन्, र ठूलो उत्पादनको लागि स्वचालित लाइनहरूमा पनि प्रयोग गर्न सकिन्छ।
उपकरण ट्र्याकको गतिशील ग्राफिक प्रदर्शन, बुद्धिमान चेतावनी प्रदर्शन, आत्म-निदान र अन्य प्रकार्यहरूले मेसिन उपकरणको प्रयोग र मर्मतलाई थप सुविधाजनक र छिटो बनाउँदछ; पढ्ने क्षमता 3000 लाइन/सेकेन्डमा बढाइएको छ, जसले ठूलो क्षमताका कार्यक्रमहरूको छिटो र प्रभावकारी प्रसारण र अनलाइन प्रक्रियालाई सुविधा दिन्छ।
पाँच-अक्ष मेसिनिङ केन्द्रको RTCP (रोटेशन उपकरण केन्द्र बिन्दु) उपकरण टिप बिन्दु नियन्त्रण प्रकार्य हो। RTCP प्रकार्य सक्रिय गरेपछि, नियन्त्रक मूल रूपमा उपकरण होल्डरको अन्तिम अनुहार नियन्त्रणबाट उपकरण टिप पोइन्ट नियन्त्रण गर्न परिवर्तन हुनेछ। निम्न उपकरण टिपले रोटरी अक्षको कारणले गर्दा रेखीयताको लागि क्षतिपूर्ति गर्न सक्छ। उपकरण टक्कर रोक्न त्रुटि। workpiece को बिन्दु A मा, उपकरण अक्षको केन्द्र रेखा तेर्सो स्थितिबाट ठाडो स्थितिमा सीधा परिवर्तन हुन्छ। यदि रैखिक त्रुटि सच्याइएको छैन भने, उपकरण टिप बिन्दु A बाट विचलित हुनेछ वा workpiece भित्र छिर्न, एक गम्भीर दुर्घटना निम्त्याउँछ। स्विङ अक्ष र रोटरी अक्षको निरन्तर आन्दोलनले बिन्दु A को स्थितिमा परिवर्तनहरू निम्त्याउने भएकोले, कार्यक्रममा मूल उपकरण टिप स्थिति सच्याउनुपर्दछ कि उपकरण टिप स्थिति समन्वयहरू सधैं बिन्दु A को सापेक्ष अपरिवर्तित छन् भनेर सुनिश्चित गर्न। उपकरण टिप बिन्दु A संग चलिरहेको छ।, यो निम्न उपकरणको टिप हो।
यस प्रकार्यमा 0 ~ 9 स्तरहरू छन्, 9 औं स्तर उच्चतम परिशुद्धता हो, जबकि 1st - 8 औं स्तरले सर्वो पछाडि त्रुटिलाई क्षतिपूर्ति दिन्छ, र प्रशोधन मार्गलाई उचित सहजता दिन्छ।
उच्च गति र उच्च परिशुद्धता त्रि-आयामी प्रशोधन
उच्च-गति स्पिन्डल, 3D आर्क मेसिनिङ नियन्त्रणले 2000 ब्लकहरू पूर्व-पढ्न सक्छ र उच्च-गति र उच्च-सटीक मेसिनिङको लागि सहज मार्ग सुधार गर्न सक्छ।
उच्च कठोरता संरचना
मेसिनको कठोरता बढाउनको लागि संरचनाको रूप सुधार गर्नुहोस् र आवंटनलाई अनुकूलन गर्नुहोस्। मेशिन उपकरण र स्तम्भको आकार र विनियोजन अनुकूलन CAE विश्लेषण मार्फत सबैभन्दा उपयुक्त आकार हो। विभिन्न सुधार गरिएका उपायहरू जुन बाहिर अदृश्य छन् एक स्थिर काटन क्षमता प्रतिबिम्बित गर्दै छन् जुन स्पिन्डल गति देखाउन सक्दैन।
प्राविधिक विनिर्देशहरू
| वस्तु | एकाइ | CV200 | CV300 | CV500 | |
| यात्रा
| X/Y/Z अक्ष यात्रा | mm | ५०० × ४०० × ३३० | 700*600*500 | 700×600×500 |
| स्पिन्डल एन्ड फेस देखि वर्कटेबल सतह सम्मको दूरी | mm | 100-430 | 150-650 | 130-630 | |
| स्पिन्डल केन्द्र देखि स्तम्भ गाइड रेल सतह को दूरी | mm | ४१२ | ६२८ | ६२८ | |
| A-axis 90° स्पिन्डल केन्द्र र C-अक्ष डिस्क सतह बीचको अधिकतम दूरी | mm | २३५ | ३६० | ३१० | |
| 3 अक्ष फिड
| X/Y/Z अक्ष द्रुत विस्थापन | m/min | ४८/४८/४८ | ४८/४८/४८ | ३६/३६/३६ |
| फिड दर कटौती | मिमी/मिनेट | 1-24000 | 1-24000 | 1-24000 | |
| स्पिन्डल
| स्पिन्डल विनिर्देशहरू (स्थापना व्यास / प्रसारण मोड) | mm | ९५/प्रत्यक्ष | 140/प्रत्यक्ष | 140/प्रत्यक्ष |
| स्पिन्डल टेपर | mm | BT30 | BT40 | BT40 | |
| स्पिन्डल गति | r/min | १२००० | १२००० | १२००० | |
| स्पिन्डल मोटर पावर (निरन्तर/S3 25%) | kW | ८.२/१२ | १५/२२.५ | १५/२२.५ | |
| स्पिन्डल मोटर टर्क (निरन्तर/S3 25%) | Nm | २६/३८ | ४७.८/७१.७ | ४७.८/७१.७ | |
| उपकरण पत्रिका
| पत्रिका क्षमता | T | २१ टी | 24T | 24T |
| उपकरण परिवर्तन समय (TT) | s | २.५ | 4 | 4 | |
| अधिकतम उपकरण व्यास (पूर्ण उपकरण/खाली उपकरण) | mm | 80 | 70/120 | 70/120 | |
| अधिकतम उपकरण लम्बाइ | mm | २५० | ३०० | ३०० | |
| अधिकतम उपकरण वजन | kg | 3 | 8 | 8 | |
| गाइड
| X-अक्ष गाइड (स्लाइडरहरूको आकार/संख्या) | mm | ३०/२ | 35/2 रोलर | 45/2 रोलर |
| Y-अक्ष गाइड (आयाम/स्लाइडरहरूको मात्रा) |
| ३०/२ | 35/2 रोलर | 45/2 रोलर | |
| Z-अक्ष गाइड (आयाम/स्लाइडरहरूको मात्रा) |
| ३०/२ | 35/2 रोलर | 45/2 रोलर | |
|
पेंच
| एक्स-अक्ष पेंच |
| Φ28×16 | Φ40×16 | Φ40×16 |
| Y-अक्ष पेंच |
| Φ28×16 | Φ40×16 | Φ40×16 | |
| Z अक्ष पेंच |
| Φ32×16 | Φ40×16 | Φ40×16 | |
| शुद्धता
| स्थिति सटीकता | mm | ±०.००५/३०० | ±०.००५/३०० | ±०.००५/३०० |
| पुनरावृत्ति | mm | ±०.००३/३०० | ±०.००३/३०० | ±०.००३/३०० | |
| 5 अक्ष
| टर्नटेबल ड्राइभ विधि |
| मोटर प्रत्यक्ष | रोलर क्याम | रोलर क्यामेरा |
| टर्नटेबल व्यास | mm | 200 | 300*250 | φ500*400 | |
| टर्नटेबलको स्वीकार्य लोड वजन (तेर्सो / झुकावमा) | kg | ४०/२० | 100/70 | २०० | |
| A/C-अक्ष अधिकतम। गति | आरपीएम | 100/230 | ६०/६० | ६०/६० | |
| A-अक्ष स्थिति/दोहोरिने योग्यता | चाप सेकेन्ड | १०/६ | १५/१० | १५/१० | |
| C-अक्ष स्थिति/दोहोरिने योग्यता | चाप सेकेन्ड | ८/४ | १५/१० | १५/१० | |
| स्नेहन
| स्नेहन एकाइ क्षमता | L | १.८ | १.८ | १.८ |
| तेल विभाजक प्रकार |
| भोल्युमेट्रिक | ग्रीस स्नेहन | भोल्युमेट्रिक | |
| अरू
| हावाको माग | kg/c㎡ | ≥६ | ≥६ | ≥६ |
| वायु स्रोत प्रवाह | mm3/मिनेट | ≥०.२ | ≥०.४ | ≥०.४ | |
| ब्याट्री क्षमता | KVA | 10 | २२.५ | 26 | |
| मेसिनको वजन (व्यापक) | t | २.९ | 7 | 8 | |
| मेकानिकल आयाम (L×W×H) | mm | १५५४×२३४६×२७६८ | 2248*2884*2860 | 2610×2884×3303 | |
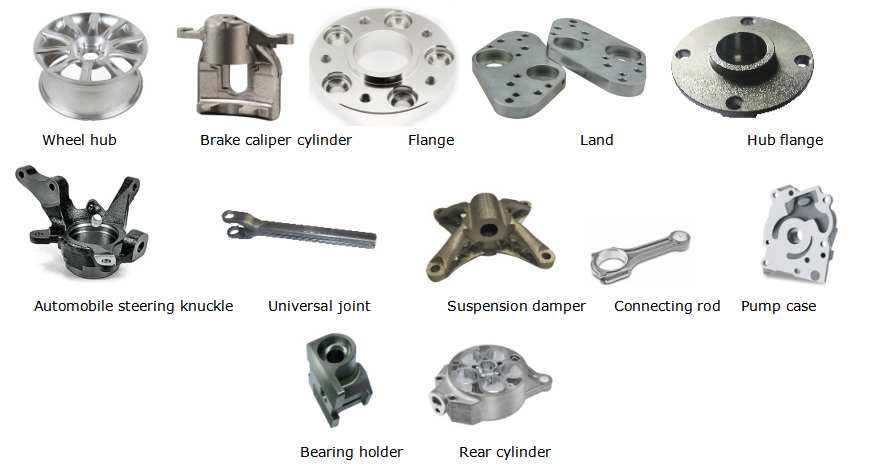
प्रशोधन उदाहरण
1. मोटर वाहन उद्योग
2. सटीक स्थिरता

3. सैन्य उद्योग






