






BOSM - तेर्सो काउन्टर ड्रिलिंग र बोरिङ मेसिन
1. उपकरण प्रयोग:
BOSM तेर्सो काउन्टर ड्रिलिंग र बोरिङ मेसिन तपाईको कम्पनीको लागि टावर क्रेन क्याप्स प्रशोधन गर्नको लागि विशेष मेसिन हो। मेसिनमा तेर्सो ड्रिलिंग र बोरिङ पावर हेडका २ सेटहरू छन्, जसले प्रभावकारी स्ट्रोक दायरा भित्र वर्कपीसको ड्रिलिंग, मिलिङ र बोरिङ महसुस गर्न सक्छ। काट्ने र अन्य प्रशोधन, उपकरण स्थिति गति छिटो छ, प्रशोधन शुद्धता उच्च छ, र प्रशोधन दक्षता उच्च छ।
2. उपकरण संरचना विशेषताहरु:
2. 1. को मुख्य घटकमेसिन
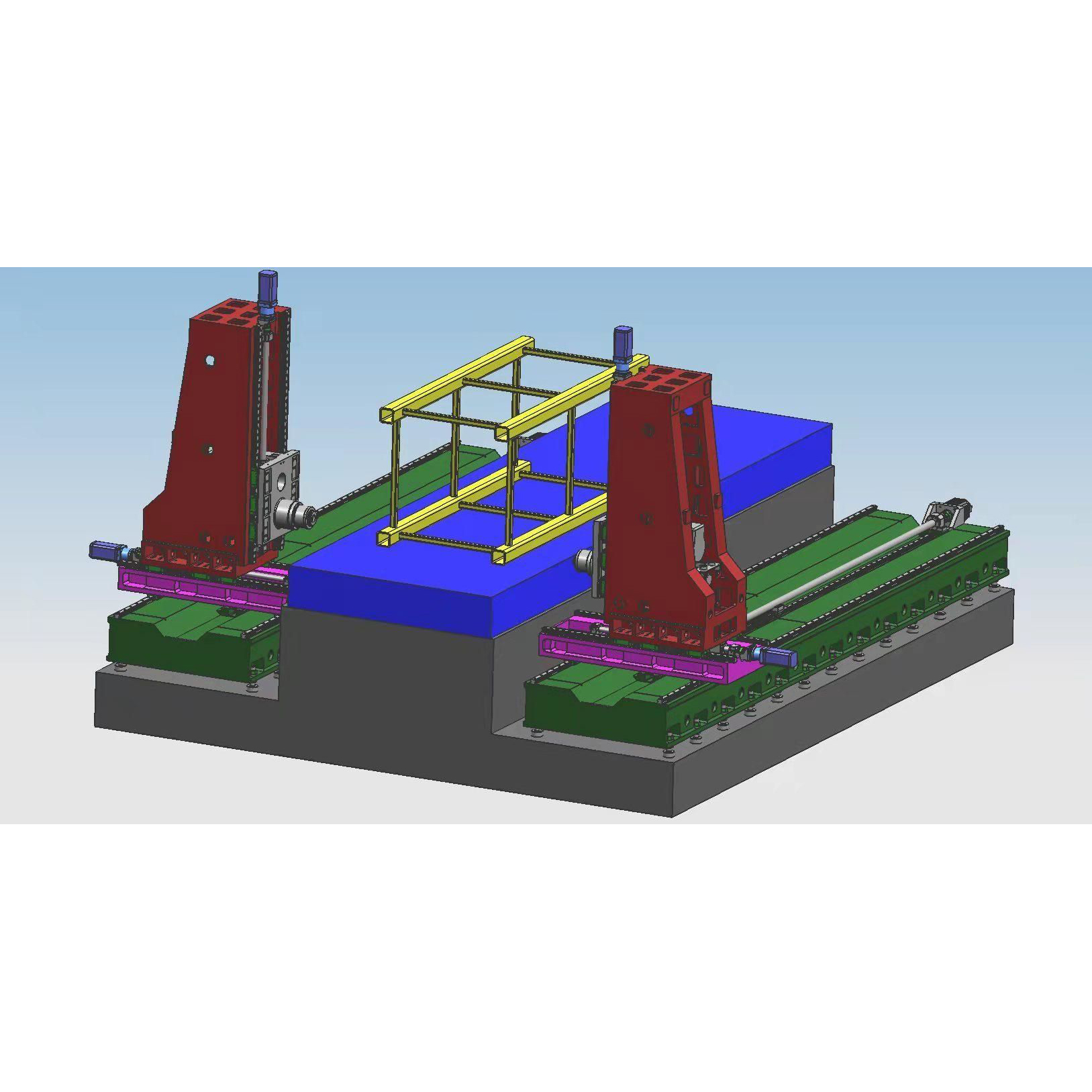
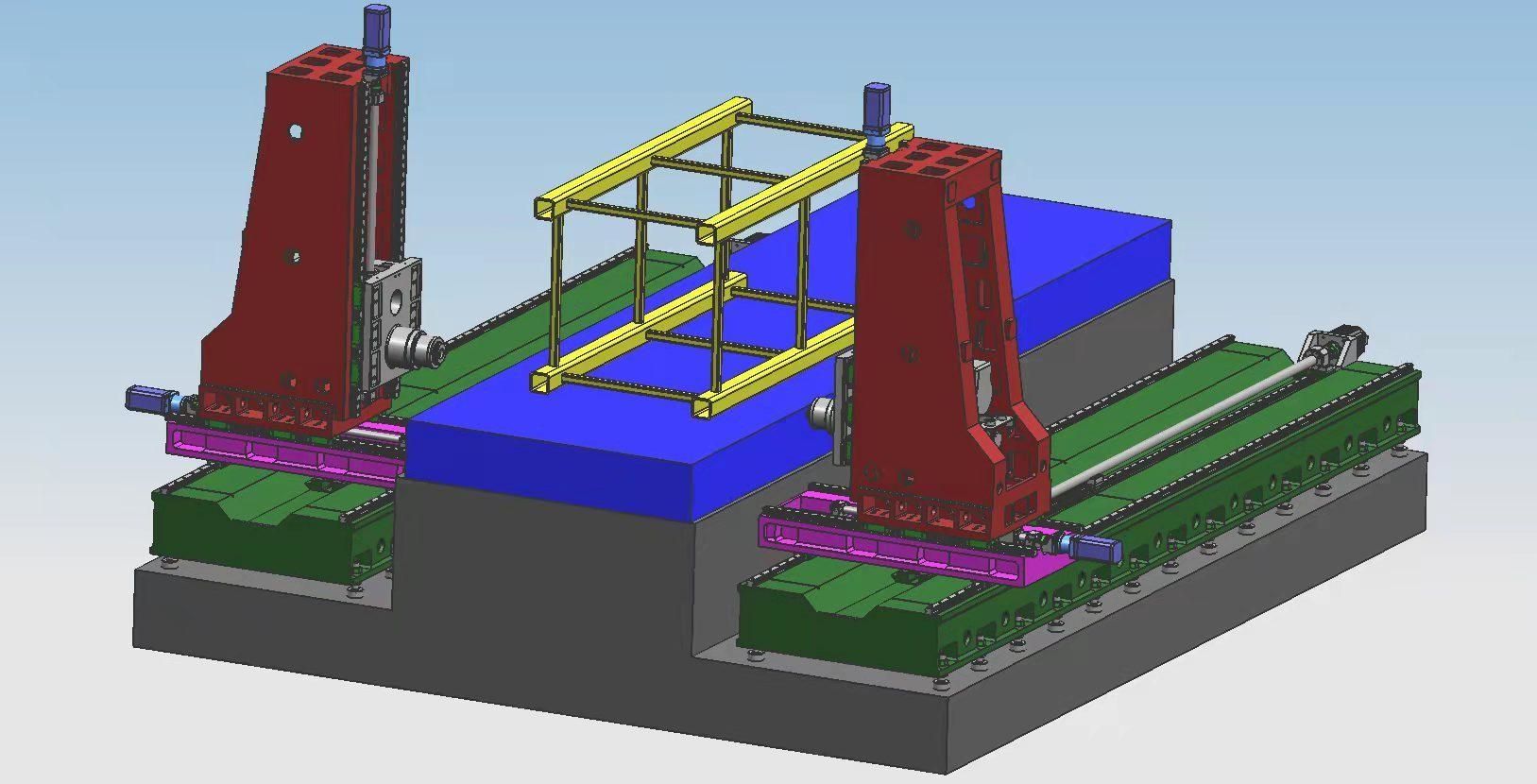
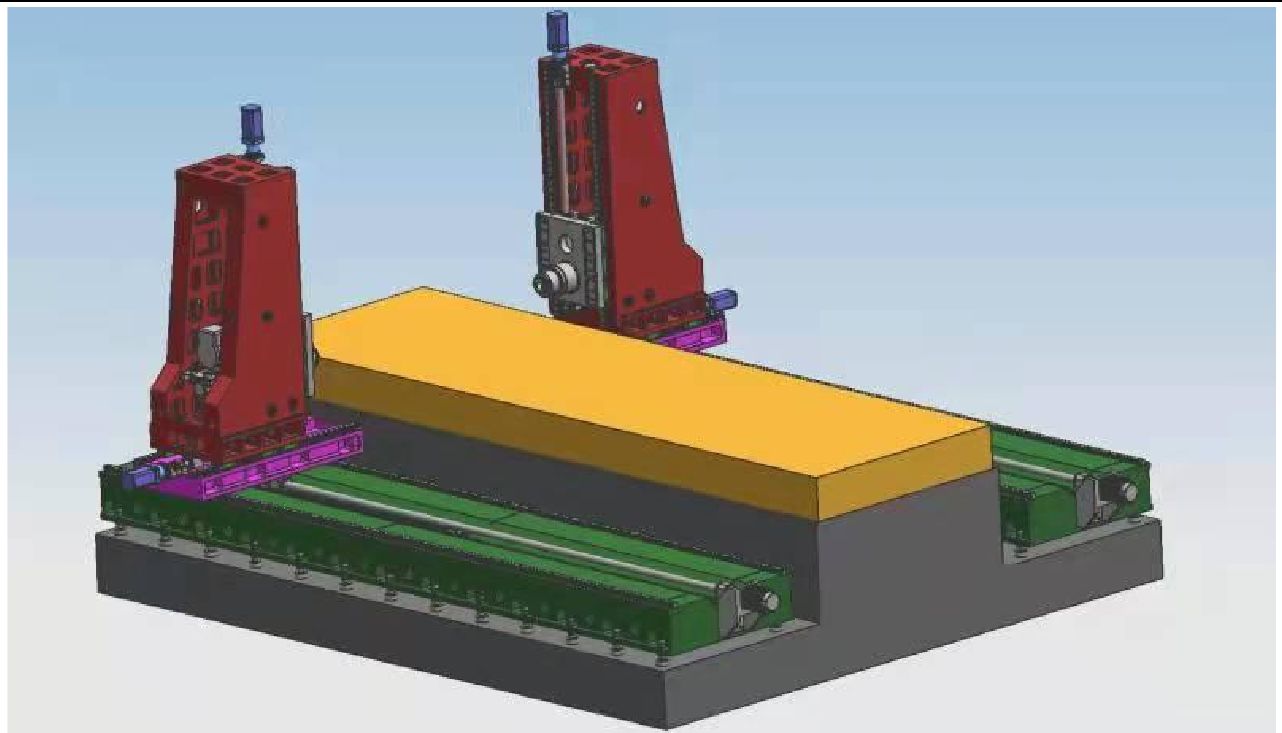
मेसिनका मुख्य कम्पोनेन्टहरू: ओछ्यान, वर्कटेबल, बायाँ र दायाँ स्तम्भहरू, काठीहरू, भेडाहरू, इत्यादि, ठूला भागहरू राल बालुवा मोल्डिंग, उच्च गुणस्तरको खैरो फलाम 250 कास्टिंग, तातो बालुवा खाडलमा एनेल गरिएको → कम्पन उमेर → तातो फर्नेस एनिलिङ → कम्पन एजिङ → रफ मेसिनिङ → कम्पन एजिङ → फर्नेस एनिलिङ → कम्पन एजिङ → पार्ट्सको नकारात्मक तनावलाई पूर्ण रूपमा हटाउन र पार्ट्सको कार्यसम्पादनलाई स्थिर राख्न फिनिसिङ। उपकरणको वर्कबेन्च फिक्स गरिएको छ, र दुबै छेउमा पावर हेडहरू आधारको अगाडि र पछाडिको दिशामा सार्न सक्छन्; मेसिनमा ड्रिलिंग, बोरिङ, काउन्टरसिङ्किङ, ट्यापिङ, आदि जस्ता कार्यहरू छन्। उपकरणको कुलिङ विधि आन्तरिक कुलिङ र बाहिरी कुलिङ हो। मेसिनमा 5 फीड अक्षहरू, 2 काट्ने पावर हेडहरू छन्, जुन एकै समयमा 5 अक्षहरूसँग सिंक्रोनाइज गर्न सकिन्छ, वा एकल-अभिनय हुन सक्छ। मेसिनको अक्षीय दिशा र पावर हेड तलको चित्रमा देखाइएको छ।
2. 2 अक्षीय प्रसारण फिड भाग को मुख्य संरचना
2.2.1 X अक्ष: पावर हेड आधारको गाईड रेलको साथमा पार्श्व रूपमा पारस्परिक हुन्छ।
X1-axis ड्राइव: AC सर्वो मोटर प्लस उच्च परिशुद्धता ग्रह रिड्यूसर X-अक्षको रैखिक गति महसुस गर्न बल स्क्रू ड्राइभ मार्फत पावर हेड ड्राइभ गर्न प्रयोग गरिन्छ।
X2-अक्ष प्रसारण: AC सर्वो मोटर प्लस उच्च-परिशुद्धता ग्रह रिड्यूसर X-अक्ष रैखिक गति महसुस गर्न बल स्क्रू प्रसारण मार्फत पावर हेड ड्राइभ गर्न प्रयोग गरिन्छ।
गाइड रेल फारम: दुई उच्च-शक्ति सटीक रैखिक गाइड रेलहरू चौडा आधारमा टाइल गरिएका छन्।
2.2 Y1 अक्ष: पावर हेड स्तम्भमा माथि र तल पारस्परिक हुन्छ।
Y1-axis ड्राइव: Y1-axis को रैखिक गति महसुस गर्न बल स्क्रू मार्फत ड्राइभ गर्न AC सर्वो मोटर अपनाउनुहोस्। गाइड रेल फारम: 45 प्रकार रैखिक गाइड रेल को 4 टुक्रा।
2.2.3 Y2 अक्ष: पावर हेड स्तम्भमा माथि र तल पारस्परिक हुन्छ।
Y2-अक्ष प्रसारण: AC सर्वो मोटर Y1-अक्षको रैखिक गति महसुस गर्न बल स्क्रू मार्फत ड्राइभ गर्न प्रयोग गरिन्छ।
गाइड रेल फारम: 45 प्रकार रैखिक गाइड रेल को 4 टुक्रा।
2.2.4 Z1 अक्ष: पावर हेडले काठीमा अगाडि र पछाडि पारस्परिक गर्दछ।
Z1-अक्ष प्रसारण: AC सर्वो मोटर र उच्च-परिशुद्धता ग्रह रिड्यूसर Z1-अक्षको रैखिक गति महसुस गर्न बल स्क्रू मार्फत आन्दोलन चलाउन प्रयोग गरिन्छ।
2.2.5 Z2 अक्ष: पावर हेडले काठीमा अगाडि र पछाडि पारस्परिक गर्दछ।
Z2-axis प्रसारण: AC सर्वो मोटर र उच्च-परिशुद्धता ग्रह रिड्यूसर Z2-axis रैखिक गति महसुस गर्न बल स्क्रू मार्फत आन्दोलन चलाउन प्रयोग गरिन्छ।
2.3. चिप हटाउने र कूलिंग
त्यहाँ वर्कबेन्च मुनि दुबै छेउमा फ्ल्याट चेन चिप कन्वेयरहरू स्थापित छन्, र फलामका चिपहरू सभ्य उत्पादनलाई महसुस गर्न चिप कन्वेयरमा अन्तमा डिस्चार्ज गर्न सकिन्छ। चिप कन्वेयरको कूलेन्ट ट्याङ्कीमा कूलिङ पम्प छ, जसलाई उपकरणको कार्यसम्पादन र सेवा जीवन सुनिश्चित गर्न उपकरणको आन्तरिक कूलिङ + बाह्य कूलिङका लागि प्रयोग गर्न सकिन्छ र कूलेन्टलाई पुन: प्रयोग गर्न सकिन्छ।
3। पूर्ण डिजिटल संख्यात्मक नियन्त्रण प्रणाली:
३.१। चिप ब्रेकिङ प्रकार्यको साथ, चिप ब्रेकिङ समय र चिप ब्रेकिङ चक्र म्यान-मेसिन इन्टरफेसमा सेट गर्न सकिन्छ।
३.२। उपकरण लिफ्टिङ प्रकार्यको साथ, उपकरण लिफ्टिङ दूरी म्यान-मेसिन इन्टरफेसमा सेट गर्न सकिन्छ। जब दूरी पुग्छ, उपकरण चाँडै उठाइनेछ, र त्यसपछि चिपहरू फ्याँकिनेछ, र त्यसपछि द्रुत रूपमा ड्रिलिंग सतहमा अगाडि बढ्नेछ र स्वचालित रूपमा काममा रूपान्तरण हुनेछ।
३.२। केन्द्रीकृत सञ्चालन नियन्त्रण बक्स र ह्यान्डहेल्ड इकाई संख्यात्मक नियन्त्रण प्रणाली अपनाउने र USB इन्टरफेस र LCD तरल क्रिस्टल डिस्प्ले संग सुसज्जित छन्। प्रोग्रामिङ, भण्डारण, प्रदर्शन र सञ्चारको सुविधाको लागि, अपरेशन इन्टरफेससँग म्यान-मेसिन संवाद, त्रुटि क्षतिपूर्ति, र स्वचालित अलार्म जस्ता कार्यहरू छन्।
3.2.. उपकरणसँग प्रशोधन गर्नु अघि प्वाल स्थिति पूर्वावलोकन र पुन: निरीक्षण गर्ने कार्य छ, र सञ्चालन धेरै सुविधाजनक छ।
4। स्वचालित स्नेहन
मिसिन सटीक रैखिक गाइड रेल जोडी, सटीक बल पेंच जोडी र अन्य उच्च परिशुद्धता गति जोडी स्वचालित स्नेहन प्रणाली संग सुसज्जित छन्। स्वचालित स्नेहन पम्पले प्रेशर तेल निकाल्छ, र मात्रात्मक लुब्रिकेटर तेल च्याम्बरले तेलमा प्रवेश गर्दछ। जब तेल च्याम्बर तेलले भरिन्छ र प्रणालीको दबाव 1.4 ~ 1.75Mpa मा बढ्छ, प्रणालीमा दबाव स्विच बन्द हुन्छ, पम्प रोकिन्छ, र अनलोडिङ भल्भ एकै समयमा अनलोड हुन्छ। जब सडकमा तेलको दबाब 0.2Mpa भन्दा कम हुन्छ, मात्रात्मक लुब्रिकेटरले लुब्रिकेटिङ बिन्दु भर्न थाल्छ र एक तेल भर्न पूरा गर्दछ। मात्रात्मक तेलर द्वारा आपूर्ति गरिएको तेलको सटीक मात्रा र प्रणालीको दबाब पत्ता लगाउने क्षमताको कारण, तेल आपूर्ति भरपर्दो छ र सुनिश्चित गर्दछ कि प्रत्येक किनेमेटिक जोडीको सतहमा तेल फिल्म छ, जसले घर्षण र पहिरन कम गर्दछ र क्षतिलाई रोक्छ। अतिताताको कारण आन्तरिक संरचनामा। , मेसिनको शुद्धता र जीवन सुनिश्चित गर्न।
5. मेसिनवातावरण प्रयोग गर्नुहोस्:
बिजुली आपूर्ति: तीन-चरण AC380V±10%, 50Hz±1 परिवेश तापमान: -10°~ 45°
6। स्वीकृति मापदण्ड:
JB/T10051-1999 "धातु काट्ने मेसिनहरूको हाइड्रोलिक प्रणालीको लागि सामान्य प्राविधिक विवरणहरू"
7। प्राविधिक मापदण्डहरू:
| मोडेल | 2050-5Z | |
| अधिकतम प्रशोधन workpiece आकार | लम्बाइ × चौडाइ × उचाइ (मिमी) | 5000×2000×1500 |
| काम गर्ने डेस्क आकार | लम्बाइ X चौडाई (मिमी) | 5000*2000 |
| पावर हेड आधार दिशा यात्रा | अगाडि र पछाडि सार्नुहोस् (मिमी) | ५००० |
| पावर हेड माथि र तल | र्यामको माथि र तल स्ट्रोक (मिमी) | १५०० |
|
तेर्सो र्याम प्रकार ड्रिलिंग पावर हेड पावर हेड 1 2 | मात्रा (2 pcs) | २ |
| स्पिन्डल टेपर | BT50 | |
| ड्रिलिंग व्यास (मिमी) | Φ2-Φ60 | |
| ट्यापिङ व्यास (मिमी) | M3-M30 | |
| स्पिन्डल गति (r/min) | ३०~३००० | |
| सर्वो स्पिन्डल मोटर पावर (किलोवाट) | 22*2 | |
| बायाँ र दायाँ यात्रा (मिमी) | ६०० | |
| द्विदिशात्मक स्थिति सटीकता | 300mm * 300mm | ±०.०२५ |
| द्वि-दिशात्मक दोहोरिने स्थिति सटीकता | 300mm * 300mm | ± ०.०२ |





