BOSM-6010 विपरित-हेड बोरिङ मिलिङ मेसिन
1. मेसिनको प्रयोग:
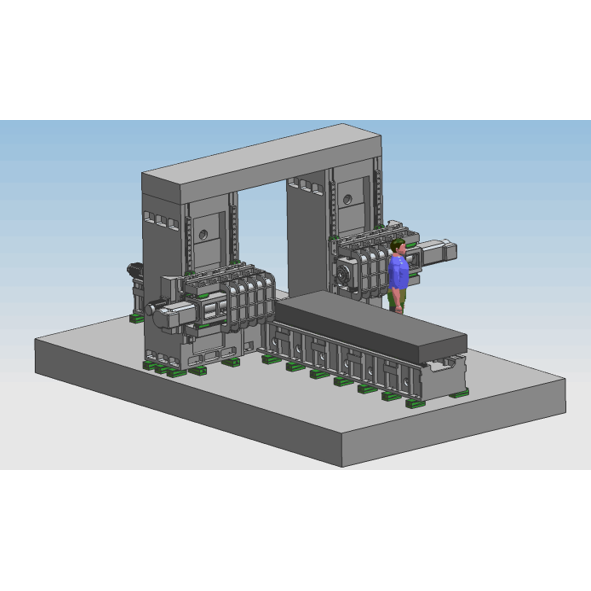
BOSM- 6000*1000 फिक्स्ड-बीम CNC ग्यान्ट्री डबल-कोलम हेड-टू-हेड बोरिङ र मिलिङ मेसिन उत्खनन हतियार/स्टिकहरू प्रशोधन गर्नको लागि एक विशेष मेसिन उपकरण हो।तकिया, workpiece को द्रुत प्रशोधन महसुस गर्न सक्छ, workpiece ड्रिल गर्न सकिन्छ, मिल, र प्रभावकारी स्ट्रोक दायरा भित्र बोर गर्न सकिन्छ, workpiece लाई एक पटकमा प्रशोधन गर्न सकिन्छ (सेकेन्डरी क्ल्याम्पिङको लागि आवश्यक पर्दैन), लोडिङ र अनलोडिङ गति। छिटो छ, स्थिति गति छिटो छ, र प्रशोधन शुद्धता उच्च छ।उच्च, उच्च प्रशोधन दक्षता।
२.मेसिन संरचनाविशेषताहरु:
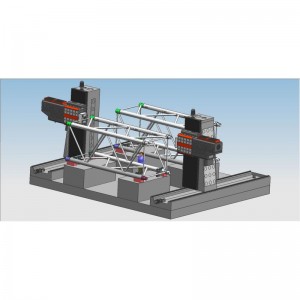
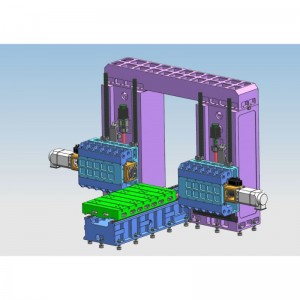
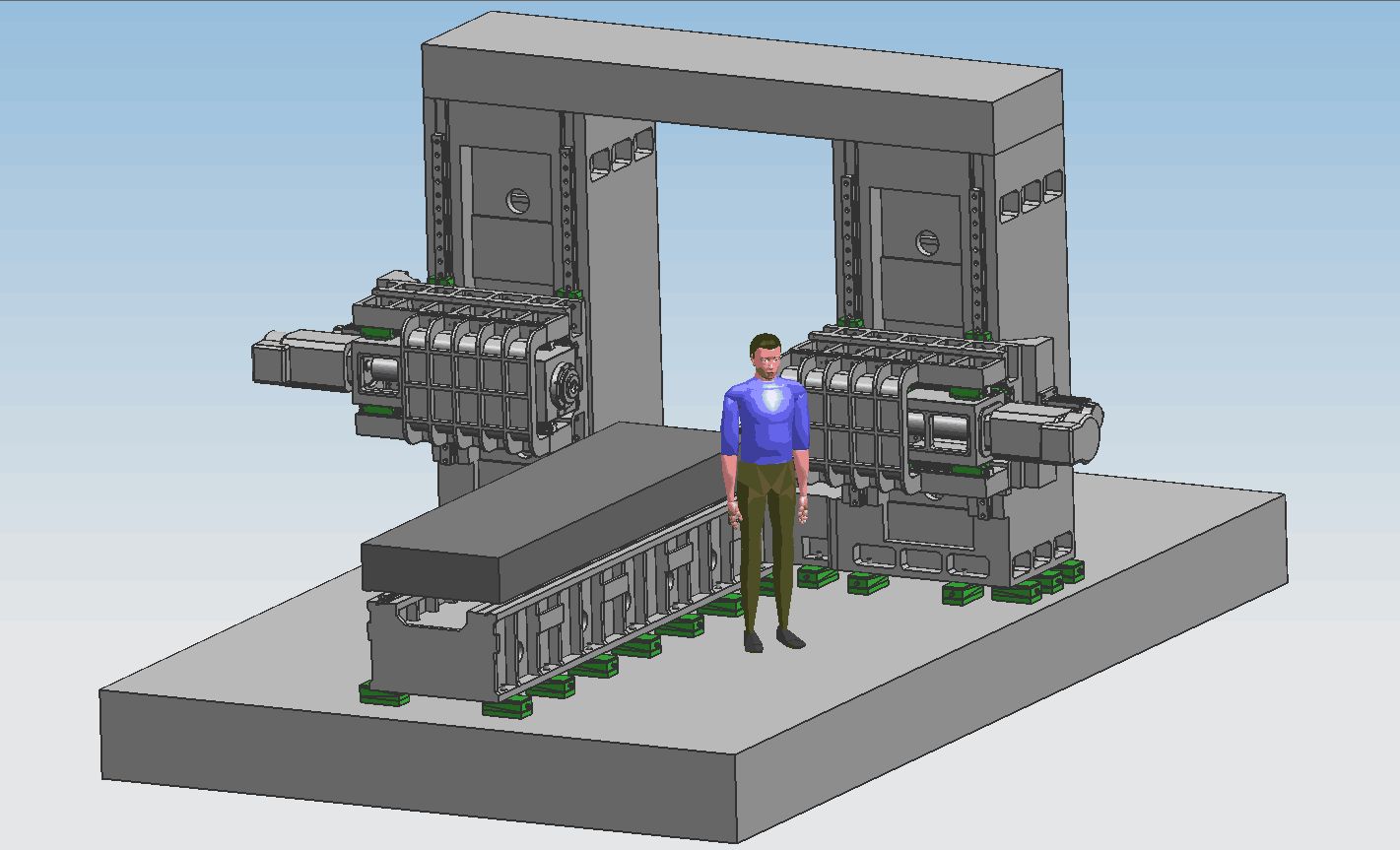
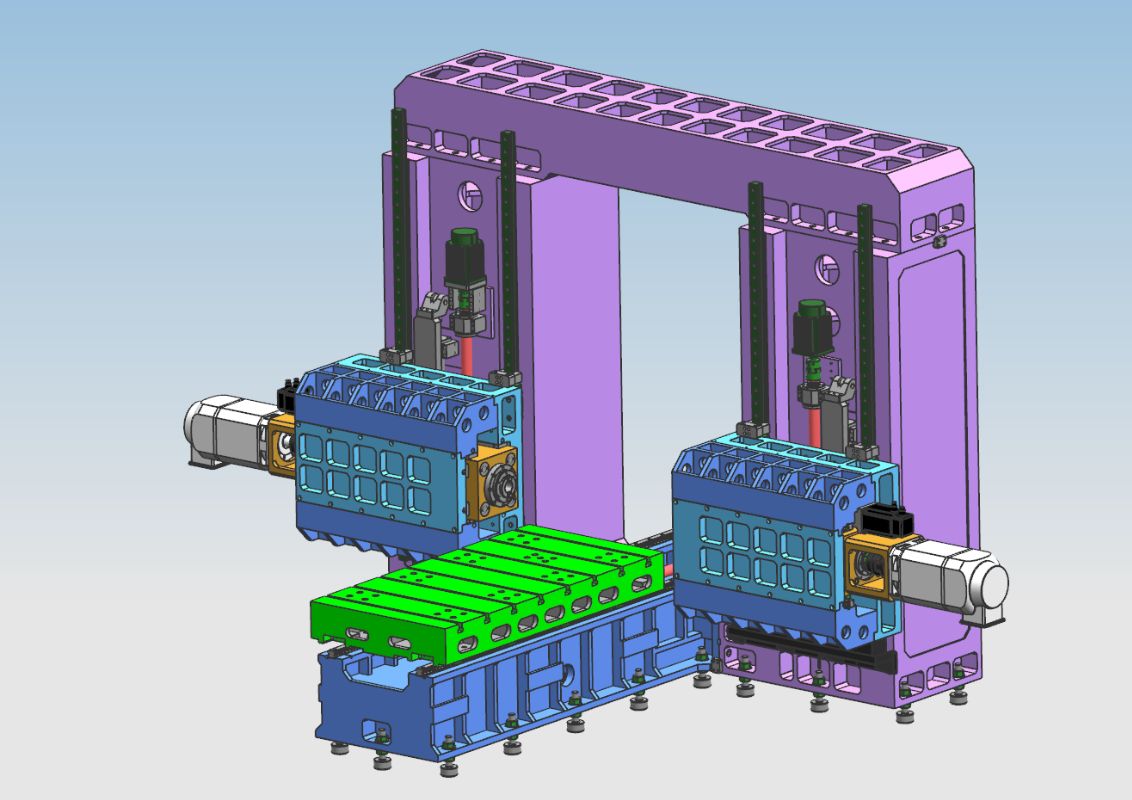
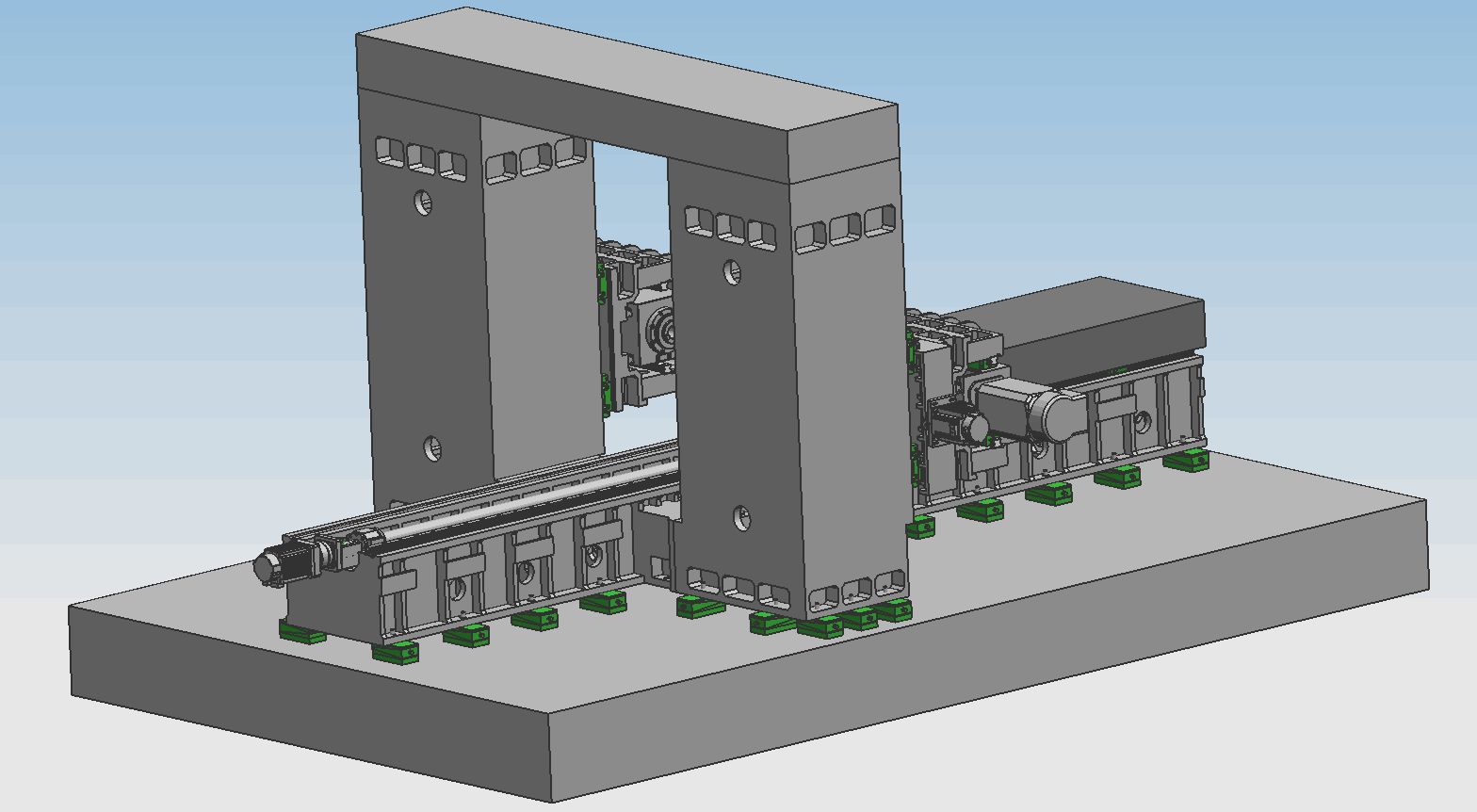
मेशिन उपकरणका मुख्य कम्पोनेन्टहरू: ओछ्यान, वर्कबेन्च, बायाँ र दायाँ स्तम्भहरू, बीमहरू, ग्यान्ट्री जडान गर्ने बीमहरू, सेडलहरू, भेडाहरू, इत्यादि, ठूला भागहरू राल बालुवा मोल्डिंग, उच्च गुणस्तरको ग्रे आइरन 250 कास्टिंग, तातोमा एनेल गरिएको। बालुवा पिट → कम्पन उमेर → गर्मी उपचार फर्नेस एनिलिङ → कम्पन उमेर → कुनै नराम्रो मेसिनिंग → कम्पन उमेर → तातो भट्टी एनेलिङ → कम्पन उमेर → फिनिशिंग, पूर्ण रूपमा भागहरूको नकारात्मक तनाव हटाउनुहोस्, र भागहरूको प्रदर्शन स्थिर राख्नुहोस्।निश्चित ओछ्यान, बायाँ र दायाँ स्तम्भहरू, ग्यान्ट्री, र वर्कबेन्च चाल;यसमा मिलिङ, बोरिङ, ड्रिलिंग, काउन्टरसिङ्किङ, ट्यापिङ, इत्यादिका कार्यहरू छन्। उपकरण कूलिङ विधि बाह्य कूलिङ हो।मेसिन उपकरणले 5 फीड अक्षहरू समावेश गर्दछ, जसले 4-अक्ष लिङ्केज र 5-अक्ष एकल-कार्य महसुस गर्न सक्छ।त्यहाँ २ पावर हेडहरू छन्।मेसिन उपकरणको अक्ष र पावर हेड तलको चित्रमा देखाइएको छ
२.१।अक्षीय प्रसारण फिड भाग को मुख्य संरचना
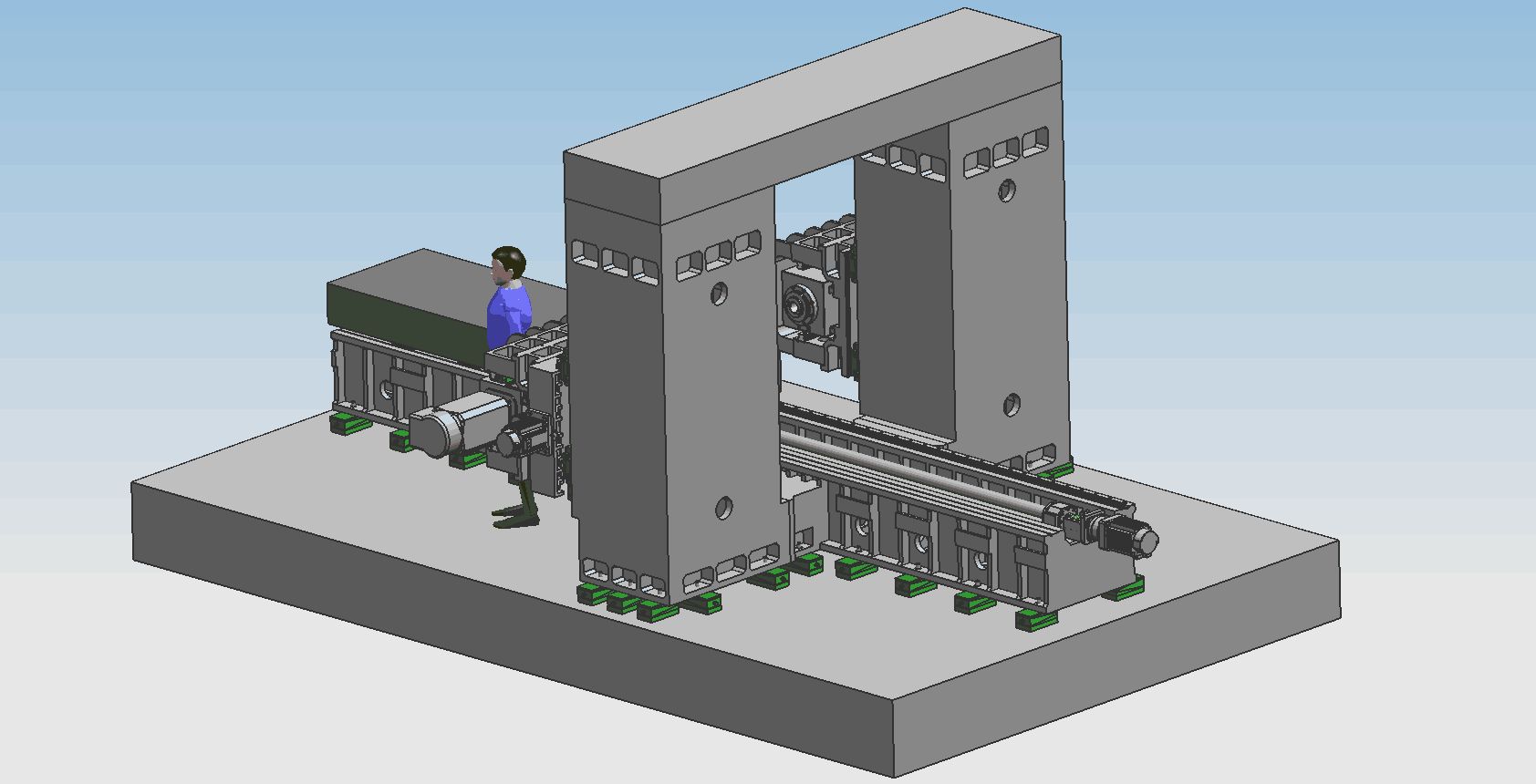
२.१.१।X-अक्ष:worktable निश्चित ओछ्यान को गाइड रेल संग पार्श्व रूपमा reciprocates।
X 1- अक्ष ड्राइव: AC सर्वो मोटर प्लस उच्च परिशुद्धता ग्रह रिड्यूसर X-अक्षको रैखिक गति महसुस गर्न वर्कबेन्चको आन्दोलन चलाउन बल स्क्रूद्वारा संचालित हुन्छ।
गाइड रेल फारम: दुई उच्च-शक्ति सटीक रैखिक गाइड रेलहरू राख्नुहोस्।
2.1.2 Z1 अक्ष:पावर हेड र काठी ठाडो रूपमा स्तम्भको अगाडिको छेउमा स्थापित छन्, र स्तम्भ गाइड रेलको साथ माथि र तल पारस्परिक रूपमा।
Z1-axis प्रसारण: AC सर्वो मोटर र सिंक्रोनस व्हील Z-axis रैखिक गति महसुस गर्न काठी ड्राइभ गर्न बल स्क्रू चलाउन प्रयोग गरिन्छ।
2.1.3 Z2 अक्ष:पावर हेड र काठी ठाडो रूपमा स्तम्भको अगाडिको छेउमा स्थापित छन्, र स्तम्भ गाइड रेलको साथ माथि र तल पारस्परिक रूपमा।
Z2-axis प्रसारण: AC सर्वो मोटर र सिंक्रोनस व्हील Z-axis रैखिक गति महसुस गर्न काठी ड्राइभ गर्न बल स्क्रू चलाउन प्रयोग गरिन्छ।
2.1.4 Y1 अक्ष:पावर हेड काठी दायाँ स्तम्भको अगाडि छेउमा ठाडो रूपमा स्थापित छ, र स्तम्भ गाइड रेलको साथ बायाँ र दायाँ पारस्परिक रूपमा।
Y1-अक्ष प्रसारण: AC सर्वो मोटर प्लस उच्च-परिशुद्धता ग्रह रिड्यूसर Y1-अक्षको रैखिक गति महसुस गर्न बल स्क्रू मार्फत सार्नको लागि र्याम ड्राइभ गर्न प्रयोग गरिन्छ।
2.1.5 Y2 अक्ष:पावर हेड काठी ठाडो रूपमा दायाँ स्तम्भको अगाडिको छेउमा स्थापित छ, र स्तम्भ गाइड रेलको साथ बायाँ र दायाँ पारस्परिक रूपमा।
Y2-अक्ष प्रसारण: AC सर्वो मोटर प्लस उच्च-परिशुद्धता ग्रह रिड्यूसर Y2-अक्ष रैखिक गति महसुस गर्न बल स्क्रू मार्फत सार्न राम ड्राइभ गर्न प्रयोग गरिन्छ।
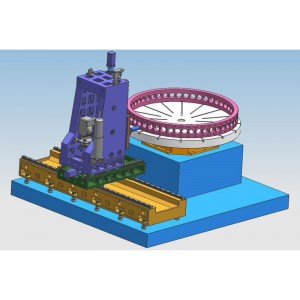
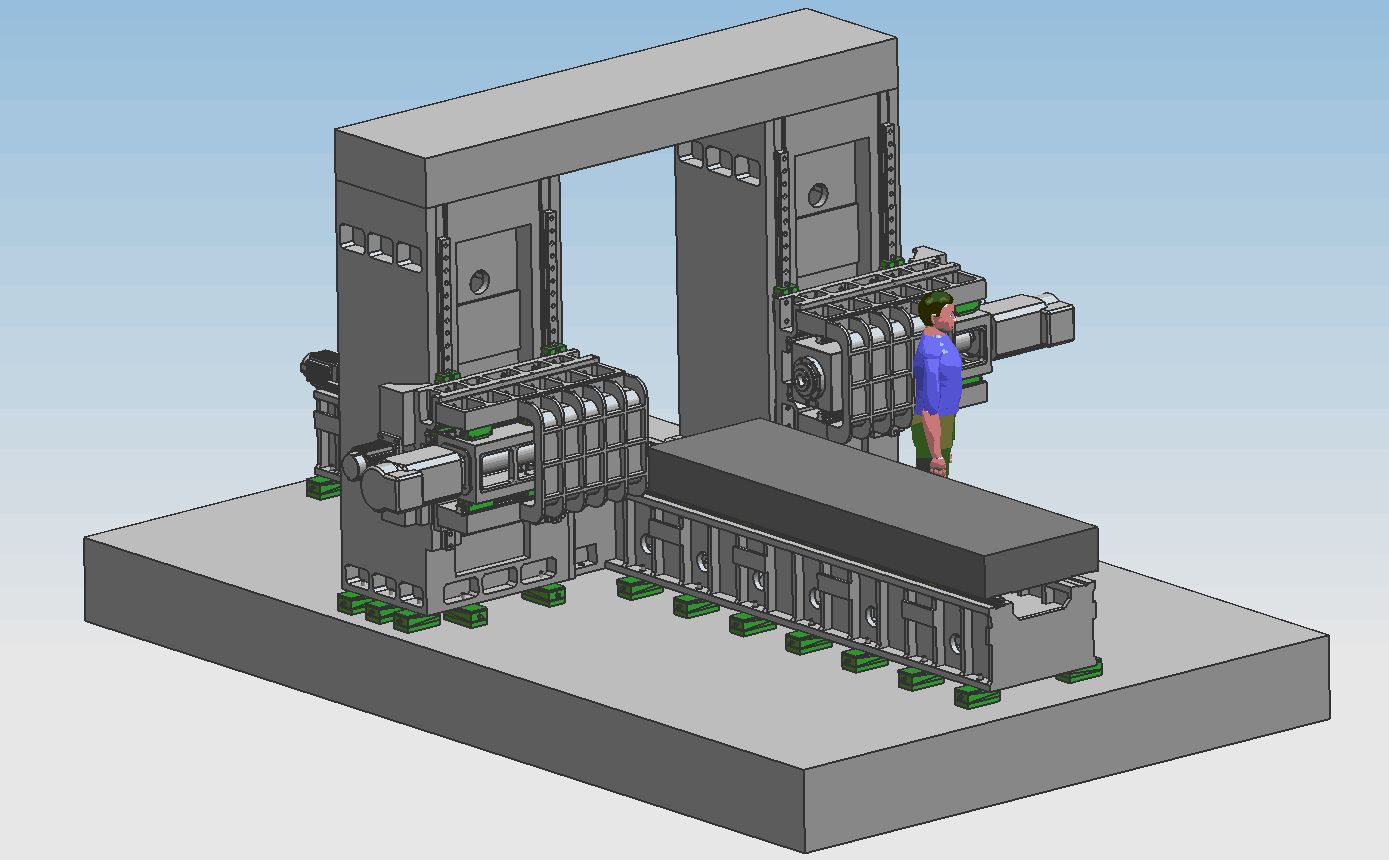
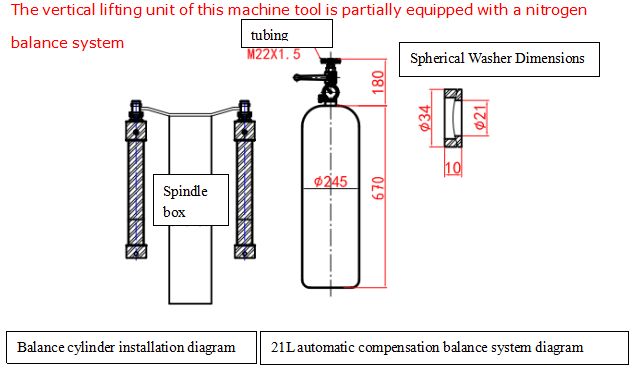
२.२।ड्रिलिङ र मिलिङ पावर हेडको गतिशील दिशा (पावर हेड १ र २ सहित) ले स्क्वायर र्याम संरचना, सबैभन्दा उन्नत तार-हार्ड संयुक्त गाइड रेल विधि अपनाउछ, कडा रेल बलियो समर्थनले घेरिएको छ, ४ रेखीय रोलर गाइड रेल जोडीहरू निर्देशित छन्, र ड्राइभले AC सर्वो मोटरलाई सिंक्रोनस बेल्ट (i=2) र सटीक बल स्क्रू ट्रान्समिशन ड्राइभ गर्दछ, पावर हेडले सिंक्रोनस बेल्ट र सिंक्रोनस व्हील मार्फत धीमा गर्न सर्वो मोटरलाई अपनाउँछ, भारी शुल्क सटीकताद्वारा निर्देशित। गाईड रेल जोडी, र घुमाउन ठाडो बल स्क्रू ड्राइभ गर्दछ, पावर हेड डु अप र डाउन ठाडो मुभमेन्ट महसुस गर्दै, र स्क्रू र सर्वो मोटरमा मेसिन हेडको असर क्षमता कम गर्न नाइट्रोजन ब्यालेन्स बारसँग सुसज्जित।Z-axis मोटरमा स्वचालित ब्रेक प्रकार्य छ।पावर विफलताको अवस्थामा, स्वचालित ब्रेकले मोटर शाफ्टलाई कडा रूपमा समात्नेछ।, ताकि यो घुमाउन सक्दैन।काम गर्दा, जब ड्रिल बिटले वर्कपीसलाई छुँदैन, यो छिटो फिड हुनेछ;जब ड्रिल बिटले workpiece छुन्छ, यो स्वचालित रूपमा काम फिडमा स्विच हुनेछ।जब ड्रिल बिट वर्कपीसमा प्रवेश गर्दछ, यो स्वचालित रूपमा छिटो रिवाइन्डमा स्विच हुनेछ;जब ड्रिल बिटको अन्त्यले वर्कपीस छोड्छ र सेट स्थितिमा पुग्छ, वर्कटेबल स्वचालित परिसंचरण महसुस गर्न अर्को प्वाल स्थितिमा सर्नेछ।पावर हेडले तार र हार्ड रेलको संयोजनलाई अपनाउँछ, जसले उपकरणको चलिरहेको गति मात्र सुनिश्चित गर्दैन, तर उपकरणको कठोरतालाई पनि बढाउँछ।र यसले ब्लाइन्ड होल ड्रिलिंग, मिलिङ, च्याम्फरिङ, चिप ब्रेकिङ, स्वचालित चिप हटाउने, आदि को कार्यहरू महसुस गर्न सक्छ, जसले श्रम उत्पादकता सुधार गर्दछ।
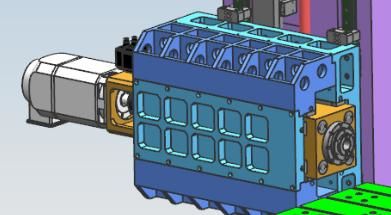
(बायाँ पावर हेड)
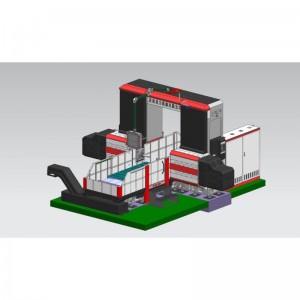
२.३चिप हटाउने र शीतलन
त्यहाँ वर्कबेन्चको मुनि दुवै छेउमा सर्पिल र फ्ल्याट चेन चिप कन्वेयरहरू स्थापित छन्, र चिपहरू स्वचालित रूपमा सर्पिल र चेन प्लेटहरूको दुई चरणहरू मार्फत चिप कन्वेयरमा डिस्चार्ज गर्न सकिन्छ सभ्य उत्पादन महसुस गर्न।चिप कन्वेयरको शीतलक ट्याङ्कीमा कूलिङ पम्प छ, जसलाई ड्रिल बिटको ड्रिलिंग कार्यसम्पादन र सेवा जीवन सुनिश्चित गर्न उपकरणको बाह्य शीतलनको लागि प्रयोग गर्न सकिन्छ, र शीतलकलाई पुन: प्रयोग गर्न सकिन्छ।
3.पूर्ण डिजिटल संख्यात्मक नियन्त्रण प्रणाली:
3.1.चिप ब्रेकिङ प्रकार्यको साथ, चिप ब्रेकिङ समय र चिप ब्रेकिङ चक्र म्यान-मेसिन इन्टरफेसमा सेट गर्न सकिन्छ।
3२.उपकरण लिफ्टिङ प्रकार्यको साथ, उपकरण लिफ्टिङ उचाइ म्यान-मेसिन इन्टरफेसमा सेट गर्न सकिन्छ।जब ड्रिलिंग यो उचाइमा पुग्छ, ड्रिल बिट चाँडै वर्कपीसको शीर्षमा लिइन्छ, र त्यसपछि चिपहरू फ्याँकिन्छ, र त्यसपछि द्रुत रूपमा ड्रिलिंग सतहमा फर्वार्ड गरिन्छ र स्वचालित रूपमा काममा रूपान्तरण हुन्छ।
3३.केन्द्रीकृत सञ्चालन नियन्त्रण बक्स र ह्यान्डहेल्ड इकाई संख्यात्मक नियन्त्रण प्रणाली अपनाउने र USB इन्टरफेस र LCD तरल क्रिस्टल डिस्प्ले संग सुसज्जित छन्।प्रोग्रामिङ, भण्डारण, प्रदर्शन र सञ्चारको सुविधाको लागि, अपरेशन इन्टरफेससँग म्यान-मेसिन संवाद, त्रुटि क्षतिपूर्ति, र स्वचालित अलार्म जस्ता कार्यहरू छन्।
3४.उपकरणसँग प्रशोधन गर्नु अघि प्वाल स्थिति पूर्वावलोकन र पुन: निरीक्षण गर्ने कार्य छ, र सञ्चालन धेरै सुविधाजनक छ।
4।स्वचालित स्नेहन
मेसिन उपकरण सटीक रैखिक गाइड रेल जोडी, सटीक बल पेंच जोडी र अन्य उच्च परिशुद्धता गति जोडी स्वचालित स्नेहन प्रणाली संग सुसज्जित छन्।स्वचालित स्नेहन पम्पले प्रेशर तेल निकाल्छ, र मात्रात्मक लुब्रिकेटर तेल च्याम्बरले तेलमा प्रवेश गर्दछ।तेल च्याम्बर तेलले भरिए पछि, जब प्रणालीको दबाव 1.4-1.75Mpa मा बढ्छ, प्रणालीमा दबाव स्विच बन्द हुन्छ, पम्प रोकिन्छ, र एकै समयमा अनलोड भल्भ अनलोड हुन्छ।जब सडकमा तेलको दबाब 0.2Mpa भन्दा कम हुन्छ, मात्रात्मक लुब्रिकेटरले लुब्रिकेटिङ बिन्दु भर्न थाल्छ र एक तेल भर्न पूरा गर्दछ।मात्रात्मक तेल इन्जेक्टरको सही तेल आपूर्ति र प्रणालीको दबाबको पहिचानको कारण, तेल आपूर्ति विश्वसनीय छ, प्रत्येक किनेमेटिक जोडीको सतहमा तेल फिल्म छ भनेर सुनिश्चित गर्दै, घर्षण र पहिरन कम गर्दछ, र क्षतिलाई रोक्न। अतिताताको कारण आन्तरिक संरचना।, मेसिन उपकरणको शुद्धता र जीवन सुनिश्चित गर्न।स्लाइडिङ गाइड रेल जोडीको तुलनामा, यस मेसिन उपकरणमा प्रयोग गरिएको रोलिङ रेखीय गाइड रेल जोडीमा फाइदाहरूको एक श्रृंखला छ:
① गति संवेदनशीलता उच्च छ, रोलिङ गाइड रेल को घर्षण गुणांक सानो छ, केवल 0.0025 ~ 0.01, र ड्राइभिङ पावर धेरै कम छ, जुन साधारण मेसिनरी को 1/10 मात्र बराबर छ।
② गतिशील र स्थिर घर्षण बीचको भिन्नता धेरै सानो छ, र फलो-अप प्रदर्शन उत्कृष्ट छ, त्यो हो, ड्राइभिङ संकेत र मेकानिकल कार्य बीचको समय अन्तराल अत्यन्त छोटो छ, जुन प्रतिक्रिया गति र संवेदनशीलता सुधार गर्न अनुकूल छ। संख्यात्मक नियन्त्रण प्रणाली।
③यो उच्च-गति रैखिक गतिको लागि उपयुक्त छ, र यसको तात्कालिक गति स्लाइडिङ गाइड रेलहरू भन्दा लगभग 10 गुणा बढी छ।
④ यसले ग्यापलेस आन्दोलनलाई महसुस गर्न सक्छ र मेकानिकल प्रणालीको आन्दोलन कठोरता सुधार गर्न सक्छ।
⑤व्यावसायिक निर्माताहरू द्वारा उत्पादित, यो उच्च परिशुद्धता, राम्रो बहुमुखी प्रतिभा र सजिलो मर्मतसम्भार छ।
5।मेसिन प्रयोग वातावरण:
बिजुली आपूर्ति: तीन-चरण AC380V ± 10%, 50Hz ± 1 परिवेश तापमान: 0 ° ~ 45 °
पाँच, मुख्य प्राविधिक मापदण्डहरू:
| मोडेल | BOSM4014 | |
| अधिकतम प्रशोधन workpiece आकार | लम्बाइ × चौडाइ × उचाइ (मिमी) 4000 × 1600 × 1000 | |
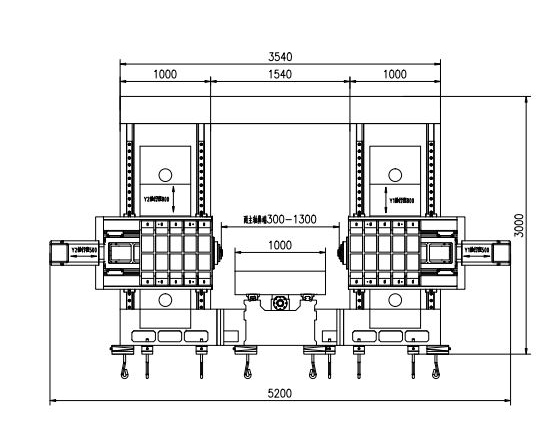
| ग्यान्ट्री अधिकतम फीड | चौडाइ (मिमी) | २३०० |
| कार्य तालिका आकार | लम्बाइ X चौडाई (मिमी) | 4000*1400 |
|
तेर्सो राम प्रकार ड्रिलिंग हेड पावर हेड एक दुई
| मात्रा (२) | २ |
| स्पिन्डल टेपर | BT50 | |
| ड्रिलिंग व्यास (मिमी) | Φ2-Φ60 | |
| ट्यापिङ व्यास (मिमी) | M3-M30 | |
| मिलिङ कटर डिस्क व्यास (मिमी) | ३०० | |
| स्पिन्डल गति (r/min) | ३०~६००० | |
| सर्वो स्पिन्डल मोटर पावर (किलोवाट) | 37 | |
| टेबलको केन्द्रबाट नाकको स्पिन्डल दूरी (मिमी) | ६५०-११५० | |
| एकल र्यामको बायाँ र दायाँ स्ट्रोक (मिमी) | ५०० | |
| र्यामको केन्द्र र तालिकाको विमान बीचको दूरी (मिमी) | 200-1400 | |
| र्यामको माथि र तल स्ट्रोक (मिमी) | १२०० | |
| पुनरावृत्ति | 300mm * 300mm | ± ०.०२ |
| मेसिन उपकरण आयामहरू | लम्बाइ × चौडाइ × उचाइ (मिमी) | रेखाचित्र अनुसार |
| कुल वजन (t) | (लगभग) ३६ | |
माथिका प्यारामिटरहरू प्रारम्भिक डिजाइन प्यारामिटरहरू हुन्।वास्तविक डिजाइनमा, वर्कपीसको प्रशोधन आवश्यकताहरू र मेसिन उपकरणको डिजाइन आवश्यकताहरू अनुसार परिवर्तनहरू हुन सक्छन्, ताकि तपाईंको कम्पनीको प्रशोधन भागहरूको आवश्यकताहरू पूरा गर्न सकियोस्।